
„Mes žengiame į dar neištirtą autonominio vairavimo sritį,“ – pasakoja dr. Peteris Mertensas, „Volvo Car Group“ vyresnysis tyrimų ir plėtros viceprezidentas. Šis žingsnis į priekį, kai vairuotojai gali sėdėti prie autonominio automobilio vairo realiame eisme viešuose keliuose, yra išskirtinis mūsų pasiekimas“.
Projektas „Drive Me“ vykdomas jau antruosius metus ir „Volvo Cars“ sparčiai juda į priekį tikslo įgyvendinimo link: iki 2017 m. pasirinktuose keliuose aplink Geteborgą „Volvo“ klientai galės išbandyti 100 autonominių automobilių.

Bandomasis projektas, vienintelis įstatymų leidėjų, transporto institucijų, didžiųjų miestų ir transporto priemonių gamintojų bendradarbiavimo pavyzdys, yra pagrindinis komponentas „Volvo Cars“ plano užtikrinti ateitį, kad „Volvo“ automobilyje keliaujantis žmogus nežus ir nebus sunkiai sužeistas.
Net transporto spūstyse galėsite prasmingai leisti laiką
Vadovaudamasi išsamia galimų techninių gedimų analize, „Volvo Cars“ sukūrė universalią ir gamybos atžvilgiu perspektyvią autonominę vairavimo sistemą. Pagrindinis šios sistemos veiksnys yra sudėtingas jutiklių, debesijos vietos nustatymo sistemų bei išmaniųjų stabdymo ir vairavimo technologijų tinklas.
„Autonominis vairavimas iš esmės pakeis mūsų požiūrį į vairavimą. Ateityje galėsite pasirinkti autonominį arba aktyvų vairavimą“, – teigia P. Mertensas. Laiką, kurį praleidžiate darbo dienomis transporto spūstyse, galėsite leisi prasmingai, nesvarbu, ar tuo metu užsiimsite darbo, ar asmeniniais reikalais“.
Žingsnis į priekį
„Volvo Cars“ autopiloto sistema sukurta taip, kad kiekvienas vairavimo aspektas būtų patikimai išsaugotas automobiliui judant autonominiu režimu. Palyginti su iki šiol naudotomis automobilių sistemomis, ši technologija sudaro sąlygas žengti lemtingą žingsnį į priekį: ji apima sistemas, kurios ne taip jautriai reaguoja į gedimus.
„Nėra sunku sukurti ir pristatyti autonominio automobilio idėją, tačiau, norėdami padaryti realią įtaką automobilių pasaulyje, turime sukurti ir pagaminti universalią, saugią, patikimą ir įperkamą sistemą“, – teigia dr. Erikas Coelinghas, „Volvo Cars“ technikos specialistas.
Pagrindinis iššūkis yra sukurti autopilotą, kuris patikimai veiktų esant įvairioms eismo sąlygoms bei sugebėtų susidoroti su galimais techniniais gedimais. Negalima tikėtis, kad kritinėje situacijoje vairuotojas sugebės staiga perimti vairavimą. Pradžioje automobiliai autonomiškai važiuos tik tam tikruose parinktuose keliuose, kuriuose yra tam tinkamos sąlygos, pavyzdžiui, keliuose nėra besikeičiančio eismo, dviratininkų arba pėsčiųjų.
Jei sukursime 99 proc. patikimą sistemą, to neužteks. Būtina kiek įmanoma labiau priartėti prie 100 proc.
Atsarginės sistemos
„Jei sukursime 99 proc. patikimą sistemą, to neužteks. Būtina kiek įmanoma labiau priartėti prie 100 proc. ir tik tuomet leisti autonominiams automobiliams įsilieti į eismą realiomis sąlygomis“, – sako Erikas Coelinghas.
Šiuo aspektu laikomės tokio paties požiūrio kaip ir lėktuvų gamintojai. Mūsų, net įvykus gedimui, veikianti architektūra apima atsargines sistemas, kurios užtikrins, kad autopilotas saugiai veiks, net jei kuris nors sistemos elementas suges“.
Pavyzdžiui, stabdžių sistemos gedimo tikimybė yra labai maža, tačiau autonominė transporto priemonė turi turėti antrą nepriklausomą sistemą, kuri prireikus sustabdytų transporto priemonę – tikrai mažai tikėtina, kad vairuotojas spės laiku paspausti stabdžio pedalą.
Susidoroja su sudėtingais scenarijais
Kelyje universalus technologinis sprendimas turi susidoroti su įvairiais scenarijais: nuo sklandaus judėjimo eismo spūstyje iki sudėtingų ar netgi avarinių eismo situacijų.

„Galimai kritinėms situacijoms skiriame ypač didelį dėmesį. Taip daro kiekvienas geras vairuotojas. Tačiau, esant realiai avarinei situacijai, automobilis reaguoja greičiau nei bet kuris žmogus“, – pasakoja Erikas Coelinghas.
Kai automobilis nebegali važiuoti autonominiu režimu – dėl neįprastų oro sąlygų, techninio gedimo arba kai pasiekiama maršruto pabaiga – sistema paragina vairuotoją perimti vairavimą.
Jei vairuotojas dėl kokios nors priežasties negali perimti vairavimo arba nepadaro to laiku, automobilio sistemos parinks saugią vietą sustoti ir pastatys automobilį.
Nauda klientams ir visuomenei
Autonominiai automobiliai ne tik palengvina žmonių gyvenimą ir suteikia galimybę naudingai leisti laiką transporto spūstyse, bet ir tausoja aplinką.
„Volvo Cars“ tikisi, kad autonominis vairavimas padės sumažinti degalų sąnaudas. Technologija taip pat galėtų padėti pagerinti transporto srautą bei atverti naujas galimybes miesto planavimui ir labiau ekonomiškai efektyvesnėms infrastruktūros investicijoms.

„Sukurti universalų technologinį sprendimą autonominiams automobiliams – didžiulis žingsnis į priekį. Kai pilotas bus sukurtas ir tinkamai veiks, gausime vertingų žinių apie autonominių automobilių „elgesį“ eismo aplinkoje. Šios žinios taip pat padės išsiaiškinti, kaip tokie automobiliai prisidės prie tvaraus judėjimo. Mūsų išmaniosios transporto priemonės yra svarbiausia sprendimo dalis. Visgi įvairiapusis socialinis aspektas yra būtinas, kad galėtume pasiūlyti tvarų kiekvieno vairuotojo judėjimą ateityje. Šis išskirtinis bendradarbiavimas, apimantis visų funkcijų tobulinimą, yra mūsų raktas į sėkmingą autonominių transporto priemonių įgyvendinimą“, – pasakoja Erikas Coelinghas.
Sisteminio „Drive Me“ sprendimo komponentų parinkimas
Jutiklių technologijos
„Volvo Cars“ kuria holistinį sprendimą, kuris padės tiksliai nustatyti vietą ir suteiks 360° erdvinį vaizdą. Tai įgyvendinama dėl kelių radarų sistemos, kamerų ir lazerinių jutiklių derinio. Dvigubas kompiuterių tinklas apdoroja informaciją ir sukuria realiojo laiko judančių ir nejudančių objektų aplinkoje žemėlapį.
Tikslus vietos nustatymas yra pagrįstas erdvine informacija bei GPS ir didelės raiškos 3D nuolat atnaujinamo skaitmeninio žemėlapio realiuoju laiku gautais duomenimis. Sistema yra pakankamai patikima, kad veiktų be vairuotojo priežiūros.
Radaro ir kameros derinys
76 GHz moduliuojamo dažnio nuolatinio bangų radaro ir kameros, įrengtos ant priekinio stiklo, derinys, yra toks pat kaip ir naujajame XC90. Sistema nuskaito eismo ženklus ir kelio reljefą bei aptinka kelyje esančius objektus, pavyzdžiui, kitus eismo dalyvius.
Erdviniai radarai
Keturi radarai, įrengti už priekinio ir galinio buferio (po vieną kiekviename automobilio kampe) gali nustatyti objektų vietą visomis kryptimis. Sukdamiesi tiek į kairę, tiek į dešinę ir skleisdami bangas, kurios atsimuša nuo ženklų, stulpų ir tunelių, jie stebi 360° vaizdą aplink automobilį.
360° erdvinis vaizdas
Keturios kameros stebi objektus, esančius netoli transporto priemonės. Dvi kameros yra po išoriniais galinio vaizdo veidrodėliais, viena – galiniame buferyje, ir dar viena – grotelėse. Šios kameros ne tik aptinka netoli esančius objektus, bet ir stebi kelio juostų žymėjimą.
Šios kameros dinamiškai prisitaiko prie pokyčių ir gali įspėti apie pasikeitimus, atsiradusius dėl apšvietimo sąlygų, pvz., įvažiavus į tunelį.

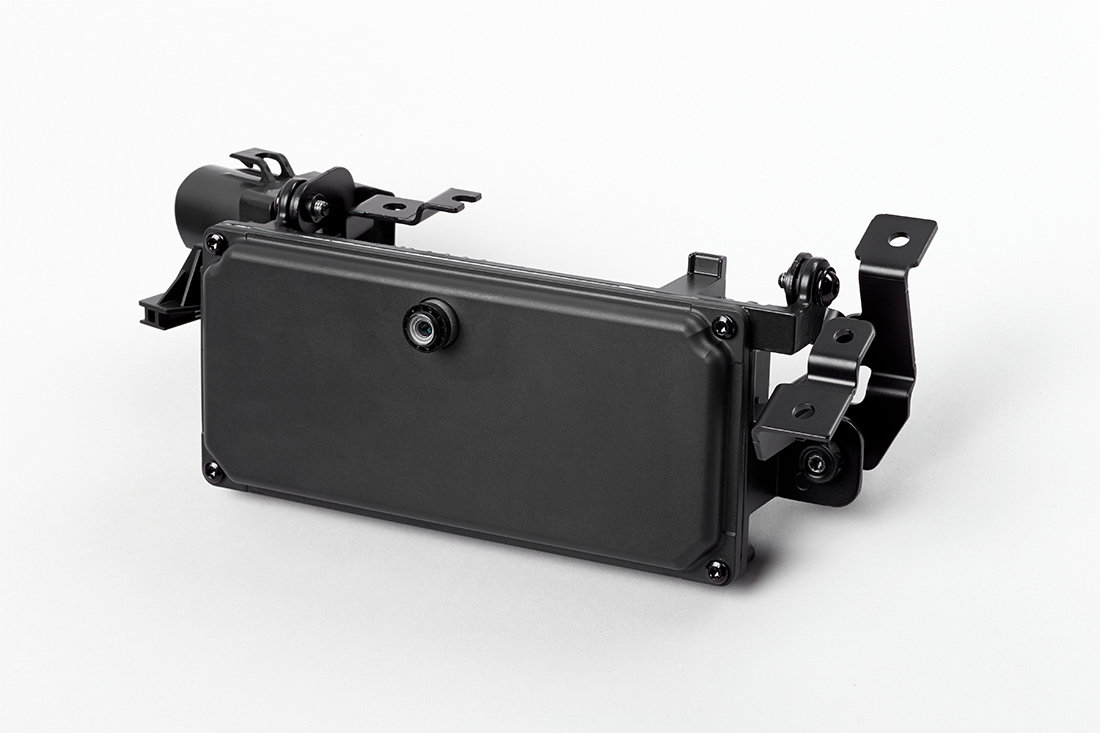
Kelių spindulių pluoštų lazerinis skaitytuvas
Ši jutiklių sistema yra įrengta automobilio priekyje, po oro įleidimo anga. Skaitytuvas gali nustatyti objektus, esančius automobilio priekyje, ir užtikrina labai didelę kampo raišką. Jis taip pat gali atskirti skirtingus objektus. Išskirtinis lazerinis jutiklis kitas transporto priemones aptinka 150 m atstumu ir suteikia 140° vaizdo aprėptį.
Kamera su trimis židinio nuotoliais
Kamera su trimis židinio nuotoliais, įrengta už viršutinės priekinio stiklo dalies, yra trys kameros vienoje kameroje. Jos atitinkamai suteikia 140° vaizdą, 45° tolimą, tačiau siaurą, vaizdą bei 34° vaizdą, skirtą suvokti gylį ir aptikti tolumoje esančius objektus. Kamera gali pastebėti staiga atsiradusius pėsčiuosius ir kitus nenumatytus pavojus, galinčius atsirasti kelyje.
Tolimieji radarai
Du tolimieji radarai, įrengti galiniame automobilio buferyje, garantuoja gerą galinio vaizdo aprėptį. Ši technologija ypač naudinga, kai vairuotojas keičia eismo juostą, nes ji gali aptikti greitai judančias transporto priemones, tolumoje artėjančias iš galo.

Ultragarsiniai jutikliai
Dvylika ultragarsinių jutiklių, išdėstytų aplink automobilį, naudojami aptikti objektus, esančius netoli transporto priemonės, ir palaikyti autonominį vairavimą esant nedideliam greičiui.
Jutiklių pagrindą sudaro technologija, naudojama dabartinėse automobilių statymo pagalbos funkcijose, ir patobulinta pasitelkiant pažangų signalo apdorojimą.
Standartinis šios technologijos teikiamos naudos pavyzdys yra nenumatytų situacijų nustatymas, pavyzdžiui, pėsčiųjų arba kitų pavojų, esančių netoli automobilio, aptikimas.
Didelės raiškos 3D skaitmeninis žemėlapis
Didelės raiškos 3D skaitmeninis žemėlapis yra įrankis, kuris suteikia transporto priemonei informacijos apie aplinką, t. y. aukštį virš jūros lygio, kelio nelygumus, eismo juostų skaičių, tunelių architektūrą, apsauginius turėklus, ženklus, išvažiavimus ir t. t. Dažniausiai padėties geometrija pateikiama centimetrais.
Itin tiksli padėties nustatymo sistema
Itin tiksli GPS yra viena padėties nustatymo valdymo dalis, patobulinta pasitelkiant pažangios GPS, trijų laisvės laipsnių sistemos pagreičio matuoklio ir 3 laisvės laipsnių giroskopo derinį. Suderindamas 360° vaizdą, sukurtą daugybės jutiklių, su žemėlapio vaizdu, automobilis gauna informacijos apie padėtį aplinkos atžvilgiu.



Suderindamas informaciją, gaunamą iš jutiklių ir žemėlapio, automobilis su „Drive Me“ gali pasirinkti geriausią maršrutą realiuoju laiku, atsižvelgdamas į tokius kintamuosius kaip kelio nelygumai, greičio apribojimas, laikinieji kelio ženklai ir esamos eismo sąlygos.
Debesijos paslaugos
Debesijos paslaugos yra sujungtos su kelių eismo tarnybų valdymo centrais. Taip garantuojama, kad bus prieinama dauguma naujausios informacijos, susijusios su kelių eismu. Jei prireikia, valdymo centrų operatoriai taip pat turi galimybę pasakyti vairuotojams išjungti autonominio vairavimo režimą.









