Mokslininkai virtualaus roboto apmokymams taikė metodą, vadinamą „mokymą, grįstą įtvirtinimu“ (angl. reinforcement learning), kai veikėjas – šiuo atveju virtualus robotas – paskatinamas judėti tikslo kryptimi, o kelio, papildyto įvairiomis kliūtimis, įveikimui naudoja tam tikrą rinkinį jutiklių ir gebėjimų. Tyrėjai robotui nenurodinėjo, kaip tą atstumą įveikti, neliepė ėjimui naudotis kojomis, o paviršius ne visuomet buvo lygus, todėl dirbtiniam intelektui pačiam reikėjo sugalvoti, ką daryti – jis pats išmoko naudotis virtualiomis galūnėmis.


Eksperimente buvo naudojami trys skirtingi virtualaus „organizmo“ variantai. Pirmasis – Planarinis ėjikas – dvikojis, berankis, begalvis sutvėrimas, kuris mokėsi ropoti, šokinėti, bėgioti ir lankstytis kariuomenės išbandymus primenančiame kliūčių ruože. Jis paliko didžiausią įspūdį – sugalvojo, kad norint peršokti per sunkiai įveikiamą, aukštą kliūtį kaip atrama galima naudotis ne tik pėda, bet ir kojos keliu.
Antrasis organizmas – Kvadropedas – mažas kamuoliukas su keturiomis kojomis, kuris mokėsi šokinėti nuo vienos aukštai ore pakibusios lentutės ant kitos, taip pat – apeidinėti arba perlipinėti dideles kliūtis. Palyginti su trečiuoju virtualiu organizmu – Humanoidu – jis buvo labai stabilus ir judėjo užtikrintai.
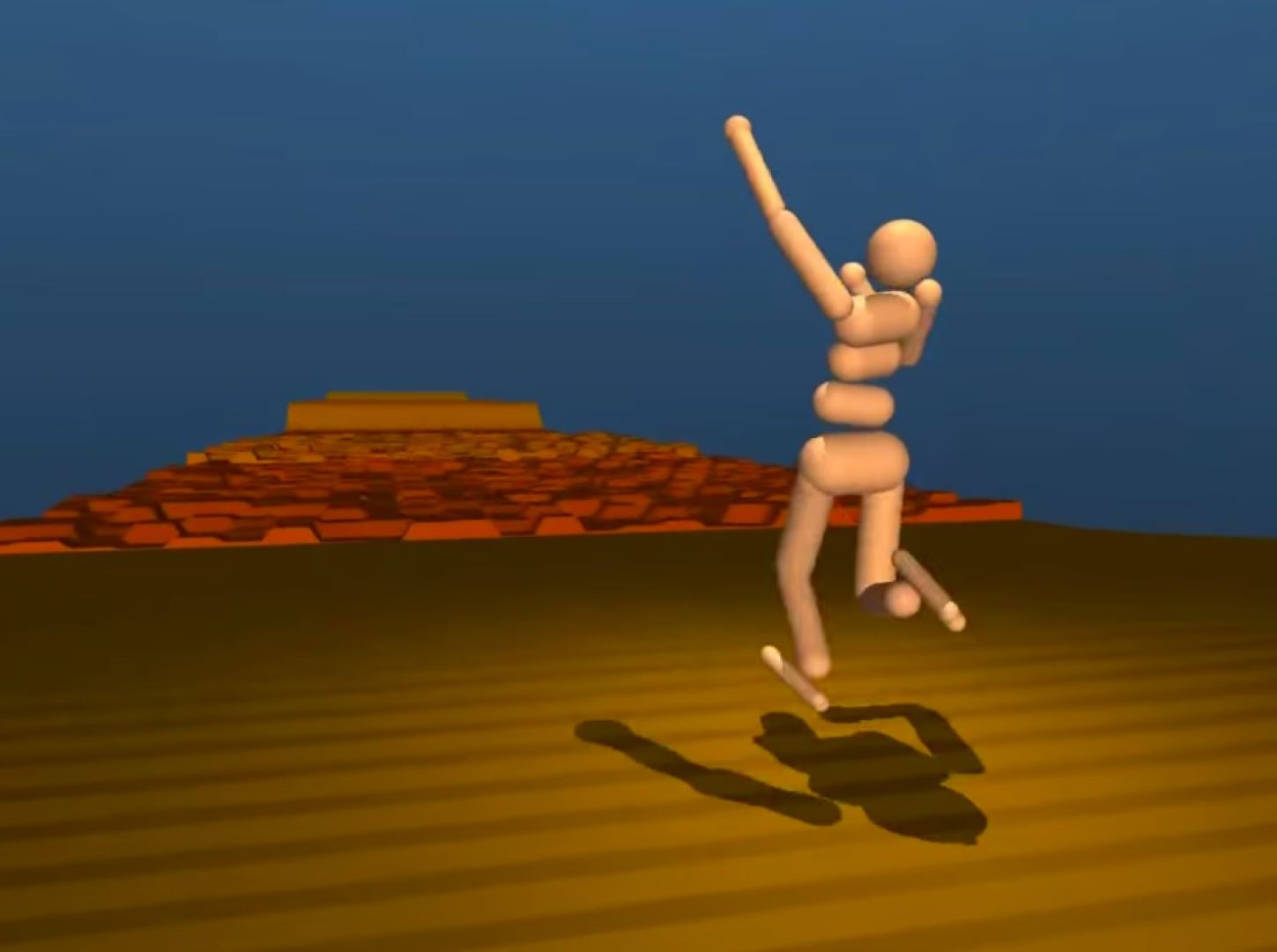
Humanoidas, kaip ir galima būtų tikėtis iš pavadinimo, buvo dvikojis, dvirankis organizmas su liemeniu ir galva. Ir nežinia, kodėl, bet dirbtinis intelektas nusprendė, kad tokio tipo organizmui patogiausia bėgioti pasvirus ir lankstant pakeltą ranką taip, tarsi joje būtų svarmuo. Šio roboto kojų naudojimas buvo ganėtinai žmogiškas, tačiau viršutinės kūno dalies judesius dirbtinis intelektas interpretavo labai jau neįprastai. Bėgimo metu – nesvarbu, ar bėgimas būtų paprastas, tiesinis, ar su kliūtimis – jis rankomis mojavo taip, kaip tikriems žmonėms visiškai neįprasta.
Tačiau įdomiausias Humanoido formos pasirinkimas buvo šuoliavimo nuo lentelės ant lentelės būdas: anot dirbtinio intelekto, geriausia tą daryti vieną koją velkant, o kita šokant šonu, drauge naudojantis ranka tarsi propeleriu.
Be jokios abejonės, dirbtinio intelekto (ne tik „Google“, o ir apskritai) gebėjimai nepaliaujamai didėja: jie jau yra žmonių su regėjimo sutrikimais pagalbininkai, geba teikti teisines konsultacijas pagal raštu užduodamus klausimus, tačiau, kaip galima spręsti pagal pastarąjį eksperimentą, neįveiktų kliūčių, už kurių yra natūrali sąveika su realiu pasauliu, taip pat daug.
Tad, nepaisant kai kurių entuziastų noro, 2020 metų Tokijo olimpinėse žaidynėse roboto, kuris galėtų varžytis su žmonėmis bėgimo varžybose, dar tikrai neišvysime.



