Tyrėjai iš NASA sugalvojo naują kosminių robotų nusileidimo ir judėjimo koncepciją, kuri padėtų paprasčiau ir gerokai pigiau ištirti saulės sistemas. Idėjos esmė – moksliniai prietaisai patalpinami į robotizuotą kamuolio formos egzoskeletą. Beje, posistemiai elementai, iš kurių susideda egzoskeletas, yra kieti, o pats egzoskeletas – elastinis, todėl jis gali lengvai keisti savo formą ir sugerti planetos paviršiaus smūgio sukeltą energiją nepakenkdamas sau ir moksliniams prietaisams.
Šioje konstrukcijoje yra nedaug pažeidžiamų detalių, kurios galėtų sulūžti nusileidus aparatui ant planetos paviršiaus arba palydovo.
Ši „sferinė“ struktūra gali nusileisti be parašiuto, oro pagalvių ir minkšto akumuliatorių nusileidimo. Ji tiesiog nukrenta ant planetos paviršiaus arba palydovo ir sugeria smūgio sukeltą energiją. Tokiu būdu superkamuolys „sutaupo“ masę, reikalingą sudėtingesniam prietaiso nusileidimui. „Sferinė“ egzoskeleto forma taip pat pašalina sunkumus, susijusius su ratuoto arba vikšrinio kosminio roboto judėjimu. Kai tik kosminis robotas pasiekia nusileidimo paviršių, jis gali naudoti tą pačią struktūrą, kad galėtų judėti paviršiumi be ratų ar vikšrų.
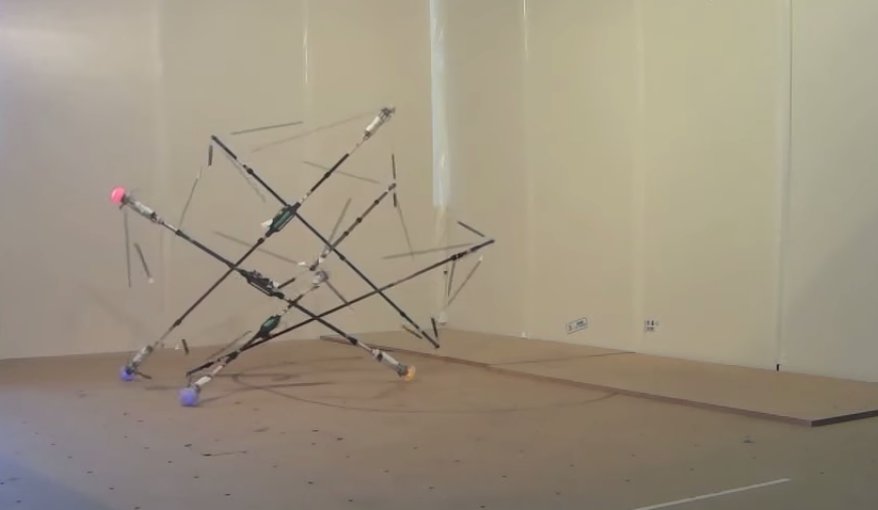
Ši nauja konstrukcija vadinasi Super Ball Bot (robotas-superkamuolys). Konstrukcija susideda iš tvirtų elementų, (tuščiavidurių cilindrinių strypų) sutvirtintų lanksčia medžiaga (elastingu trosu). Šioje konstrukcijoje yra nedaug pažeidžiamų detalių, kurios galėtų sulūžti nusileidus aparatui ant planetos paviršiaus arba palydovo.
Tačiau Marso atmosfera yra labai plona, todėl superkamuolys leisdamasis į šią planetą turėtų pasinaudoti parašiutu. Todėl mokslininkų dėmesį patraukė Saturno palydovas Titanas, kurio atmosfera gali sumažinti kosminio laivo greičio kritimą taip, kad robotą būtų galima išmesti iš 100 km aukščio. Superkamuolį galima labai kompaktiškai sulankstyti ir patalpinti į kosminį laivą. O išmetimo metu įsitempus trosui jis įgautų savo realią formą. Trumpinant ir ilginant trosus, kuriais sujungti tvirti roboto-superkamuolio elementai, robotas galėtų riedėti dirvos paviršiumi. Taip pat dėl tų pačių kabelių galima būtų pakeisti roboto formą taip, kad centre išdėstyti moksliniai prietaisai būtų naudojami reikalingiems tyrimams atlikti.




