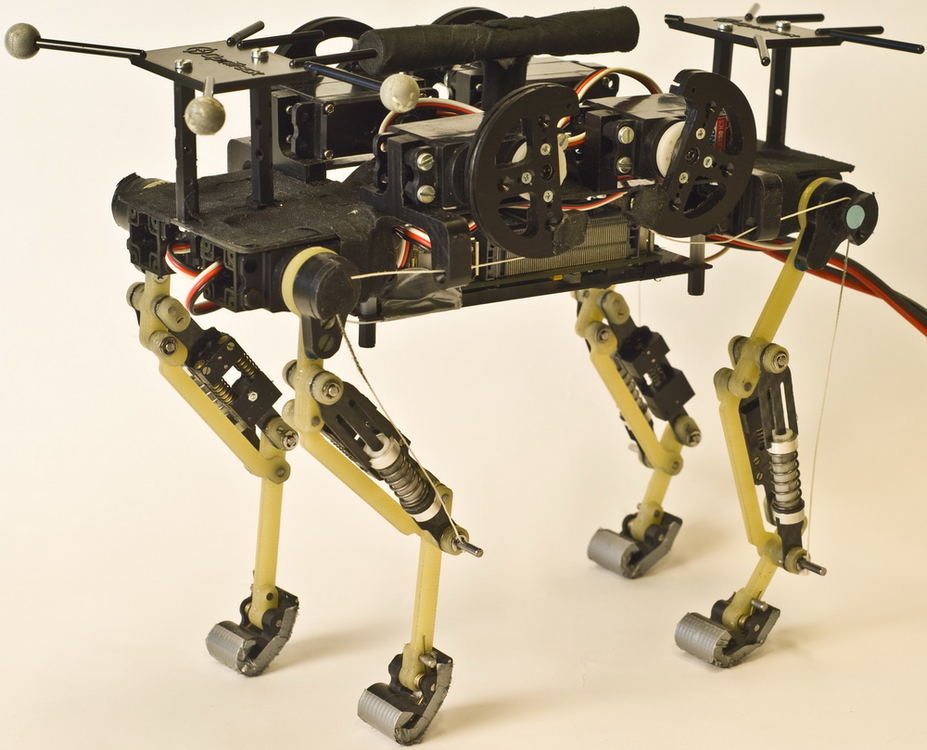
Nors mažas, lengvas, greitai bėgiojantis keturkojis robotas ir neturi galvos, tai nesudaro sunkumų jį atpažinti kaip visiems gerai žinomą naminį gyvūnėlį, kadangi jis juda taip pat, kaip ir daugelis katinų šeimos žinduolių. Inžinieriams imituoti tikslų judėjimą pavyko išskirtiniu būdu sukonstravus mechaninio įrenginio kojas, kurios pagrindinį roboto korpusą išlaiko itin stabilioje padėtyje.
Metalinį keturkojį mokslininkai sukonstravo pirmiausia tam, kad paskatintų tolimesnius biomechanikos tyrimus – šis prototipas tėra koncepcinis modelis, o jame panaudotos technologijos nėra išbaigtos ir turėtų būti tobulinamos toliau. Tokios techninės platformos pagrindu sukurti ateities robotai galėtų būti pritaikyti gelbėjimo misijose ar žmogaus sveikatai pavojingų vietovių tyrinėjime.
Inžinierių sukonstruotas mechaninis įrenginys yra greičiausias savo kategorijoje – už jį greičiau judėti galinčių, mažiau nei 30 kg sveriančių keturkojų robotų kol kas nėra sukurta. Nors robotas ir nėra toks vikrus kaip tikra katė, jis pasižymi puikiomis automatinio stabilizavimo charakteristikomis. Tai reiškia, kad yra itin maža tikimybė, jog tiek bėgant visu greičiu, tiek judant po žingsnelį ši „dirbtinė katė“ nugrius. Be to, robotas gali būti pagamintas iš nebrangių medžiagų bei detalių.
Kaip jau minėta, „dirbtinė katė“ pasižymi ypatinga kojų konstrukcija. Inžinieriai jas sukūrė po ilgo ir kruopštaus tikrų kačių judesių stebėjimo bei analizės. Kaip ir tikros katės atveju, kiekvieną roboto koją sudaro trys segmentai, kurių ilgis atitinka gyvo katino proporcijas. Metalinės kojų spyruoklės buvo panaudotos kaip sausgyslių pakaitalas, o judėjimui skirti nedideli varikliai pakeitė raumenis.
Lozanos technologijų instituto biorobotikos laboratorijoje be šios „dirbtinės katės“ mokslininkai taip pat yra sukūrę salamandrą bei nėgę (primityvus stuburinis vandens gyvūnas) imituojančius robotus.
Siūlome peržiūrėti reportažą, kuriame vienas iš robotą-katę sukūrusių mokslininkų savo išradimą pristato detaliau: